


















丨 产品介绍
GNSS高精度接收机具有多个卫星系统,实现精确的厘米级定位,适用于无人机、汽车和测量领域。
它使用载波相位差技术来确保精度,并在基站和移动台模式下运行,支持RTCM标准。
静态精度小于1厘米,动态精度小于2厘米,输出速率高达1-10/20Hz,性能优异,价格竞争力强。
特点:
1. 支持多系统:支持北斗、GPS、GALILEO、GLONASS四种型号的联合计算
2. 四臂螺旋:内置四臂螺旋天线组合,实现厘米级高精度定位
3. 灵活性:可以配置为基站或移动站。
4. 兼容性:与Pixhawk和APM等飞行系统兼容。
5. 低噪声:采用工业级低噪声射频电路,抗多径抑制能力强,提高信号接收质量
6. 高精度:支持差分定位和矢量测量模式,提供准确的结果。
丨 规格参数
|
图片
参数 |
|
|
|
|
|
产品名称 |
AK712G |
AK712RMG |
AK717G |
AK973TG |
|
芯片 |
UBX-F9P |
UBX-F9P |
UBLOX ZED-F9P |
UM960 |
|
工作频率 |
BDS: B1 B2 GPS: L1 L2 GLONASS: L1 L2 GALILEO:E1E2 QZSS: L1 L2 SBAS: WASS,EGNOS,MSAS |
BDS: B1 B2 GPS: L1 L2 GLONASS: L1 L2 GALILEO: E1 E2 QZSS: L1 L2 SBAS: WASS,EGNOS,MSAS |
GPS: L1, L2; BDS: B1I, B2I; GLONASS: L1, L2; Galileo: E1, E5b; QZSS :L1 L2 SBAS: WASS, EGNOS, MSAS |
BDS: B1I、B2I、B3I、B1C、B2a GPS: L1C/A、L2P(W)、L2C、L5 GLONASS: L1C/A、L2C/A Galileo: E1、E5b、E5a QZSS: L1、L2、L5 |
|
接收通道 |
184 |
184 |
184 |
1408 |
|
冷启动 |
26s |
26s |
26s |
< 30 s |
|
热启动 |
2s |
2s |
2s |
/ |
|
重捕获 |
2s |
2s |
2s |
/ |
|
初始化时间 |
<5s (典型值) |
<5s (典型值) |
<5s (典型值) |
<5s (典型值) |
|
水平精度 |
普通定位:1.5m CEP |
普通定位:1.5m CEP |
普通定位:1.5m CEP |
普通定位:1.5m CEP |
|
|
RTK定位:0.01cm+ 1 ppm CEP |
RTK定位:0.01cm+ 1 ppm CEP |
RTK定位:0.01 m + 1 ppm CEP |
RTK定位:0.008m+ 1.5 ppm |
|
速度精度 |
<0.05m/s |
<0.05m/s |
<0.05m/s |
0.03m/s |
|
时间精度 |
30ns |
30ns |
30ns |
20ns |
|
收敛时间 |
≤10s |
≤10s |
≤10s |
/ |
|
波特率 |
38400bps(默认) |
38400bps(默认) |
38400bps(默认) |
115200bps(默认) |
|
输出接口 |
TTL |
TTL |
TTL |
TTL |
|
输出协议 |
NMEA0183,RTCM 3.3,UBX |
NMEA0183,RTCM 3.3,UBX |
NMEA0183,RTCM 3.3,UBX |
NMEA 0183, Unicore* |
|
更新频率 |
默认1Hz ( 0.25Hz-10Hz) |
默认1Hz ( 0.25Hz-10Hz) |
默认1Hz ( 0.25Hz-10Hz) |
默认1Hz ( 0.25Hz-20Hz) |
|
载波相位输出 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
|
FLASH |
内置 |
内置 |
内置 |
内置 |
|
工作电压 |
3V-5.5V DC |
3V-5.5V DC |
3.3-5.5V DC |
5V DC |
|
功耗 |
<180mW @3.3V |
<180mW @3.3V |
<180mW @3.3V |
800mW |
|
尺寸 |
Φ42*31.2mm |
Φ42*31.2mm |
Φ42*31.2mm |
Φ42*31.2mm |
|
重量 |
13.2g |
13.2g |
13.2g |
13.2g |
|
接头 |
GH1.25mm 8pin |
GH1.25mm 8pin |
GH1.25mm 6pin |
GH1.25mm 8pin |
|
工作温度 |
-35℃+80℃ |
-35℃+80℃ |
-35℃+80℃ |
-35℃+80℃ |
|
存储温度 |
-40℃-+85℃ |
-40℃-+85℃ |
-40℃-+85℃ |
-40℃-+85℃ |
|
罗盘 |
|
内置带电子罗盘RM3100 |
内置带电子罗盘IST8310 |
内置带电子罗盘IST8310 |






|
图片
参数 |
|
|
|
|
产品名称 |
AK713G |
AK723TG |
AK713RMG |
|
芯片 |
UM980 |
UM980 |
UM980 |
|
工作频率 |
BDS: B1I B2I B3I B1C B2a B2b GPS: L1 C/A L1C L2P (Y) L2C L5 GLONASS: L1 L2 Galileo: E1 E5a E5b E6 QZSS: L1 L2 L5 L6 |
BDS: B1I B2I B3I B1C B2a B2b GPS: L1 C/A L1C L2P (Y) L2C L5 GLONASS: L1 L2 Galileo: E1 E5a E5b E6 QZSS: L1 L2 L5 L6 |
BDS: B1I B2I B3I B1C B2a B2b GPS: L1 C/A L1C L2P (Y) L2C L5 GLONASS: L1 L2 Galileo: E1 E5a E5b E6 QZSS: L1 L2 L5 L6 |
|
接收通道 |
1408 |
1408 |
1408 |
|
冷启动 |
<10s |
<10s |
<10s |
|
初始化时间 |
<5s ( 典型值 ) |
<5s ( 典型值 ) |
<5s ( 典型值 ) |
|
水平精度 |
普通定位:1.5m CEP |
普通定位:1.5m CEP |
普通定位:1.5m CEP |
|
RTK定位:0.008m+ 1 ppm CEP |
RTK定位:0.008m+ 1 ppm CEP |
RTK定位:0.008m+ 1 ppm CEP |
|
|
速度精度 |
0.03m/s |
0.03m/s |
0.03m/s |
|
时间精度 |
10ns |
10ns |
10ns |
|
波特率 |
115200bps(默认) |
115200bps(默认) |
115200bps(默认) |
|
输出接口 |
TTL |
TTL |
TTL |
|
输出协议 |
NMEA0183、RTCM 3.3 |
NMEA0183、RTCM 3.3 |
NMEA0183、RTCM 3.3 |
|
更新频率 |
默认1Hz(0.25Hz-20Hz) |
默认1Hz(0.25Hz-20Hz) |
默认1Hz(0.25Hz-20Hz) |
|
载波相位输出 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
|
FLASH |
内置 |
内置 |
内置 |
|
工作电压 |
3V-5.5V DC |
3V-5.5V DC |
3V-5.5V DC |
|
功耗 |
800mW |
800mW |
800mW |
|
尺寸 |
Φ42*31.2mm |
Φ42*31.2mm |
Φ42*31.2mm |
|
重量 |
13.2g |
13.2g |
13.2g |
|
接头 |
GH1.25mm 8pin |
GH1.25mm 8pin |
GH1.25mm 8pin |
|
工作温度 |
-35℃-80℃ |
-35℃-80℃ |
-35℃-80℃ |
|
存储温度 |
-40℃-95℃ |
-40℃-95℃ |
-40℃-95℃ |
|
罗盘 |
无 |
内置电子罗盘IST8310 |
内置电子罗盘RM3100 |



|
图片
参数 |
|
|
|
|
|
产品名称 |
AK714G |
AK714TG |
AK723TG |
AK723RMG |
|
芯片 |
北云M20 |
北云M20 |
UM981 |
UM981 |
|
工作频率 |
BDS:B1l、 B2l、B3l、B1C、B2a、B2b GPS:L1 C/A、L1C、L2、L5 GLO:G1、G2 GAL:E1、E5a、E5b、E6 QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS) NavlC:L5 SBAS*:L1 C/A |
BDS:B1l、 B2l、B3l、B1C、B2a、B2b GPS:L1 C/A、L1C、L2、L5 GLO:G1、G2 GAL:E1、E5a、E5b、E6 QZSS:L1 C/A、L1C、L2、L5、L6 (CLAS) NavlC:L5 SBAS*:L1 C/A |
BDS: B1I B2I B3I B1C B2a B2b GPS: L1 C/A L1C L2P (Y) L2C L5 GLONASS: L1 L2 Galileo: E1 E5a E5b E6 QZSS: L1 L2 L5 L6 NavIC L5 SBAS L1C/A |
BDS: B1I B2I B3I B1C B2a B2b GPS: L1 C/A L1C L2P (Y) L2C L5 GLONASS: L1 L2 Galileo: E1 E5a E5b E6 QZSS: L1 L2 L5 L6 NavIC L5 SBAS L1C/A |
|
接收通道 |
1507 |
1507 |
1408 |
1408 |
|
冷启动 |
≤30s |
≤30s |
26s |
26s |
|
热启动 |
≤5s |
≤5s |
2s |
2s |
|
重捕获 |
≤1s |
≤1s |
2s |
2s |
|
惯性导航精度 |
/ |
/ |
< 5% × 行驶距离(无 GNSS 信号) |
< 5% × 行驶距离(无 GNSS 信号) |
|
水平精度 |
普通定位:1.5mCEP |
普通定位:1.5mCEP |
普通定位:1.5m CEP |
普通定位:1.5m CEP |
|
RTK定位:0.01m+1ppmCEP |
RTK定位:0.01m+1ppmCEP |
RTK定位:0.008m+ 1 ppm CEP |
RTK定位:0.008m+ 1 ppm CEP |
|
|
速度精度 |
0.03m/s |
0.03m/s |
0.05m/s |
0.05m/s |
|
时间精度 |
≤20ns |
≤20ns |
30ns |
30ns |
|
波特率 |
115200bps(默认) |
115200bps(默认) |
115200bps(默认) |
115200bps(默认) |
|
输出接口 |
TTL |
TTL |
TTL |
TTL |
|
输出协议 |
NMEA,RTCM3.3, UBX |
NMEA,RTCM3.3, UBX |
NMEA0183、Unicore |
NMEA0183、Unicore |
|
更新频率 |
默认1Hz(0.25Hz-10Hz) |
默认1Hz(0.25Hz-10Hz) |
默认1Hz ( 0.25Hz-50Hz) |
默认1Hz ( 0.25Hz-50Hz) |
|
载波相位输出 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
支持,输出RAWX语句 |
|
FLASH |
内置 |
内置 |
内置 |
内置 |
|
工作电压 |
3V~5.5V DC |
3V~5.5V DC |
3V-5.5V DC |
3V-5.5V DC |
|
功耗 |
<800mW@3.3V |
<800mW@3.3V |
<800mW@3.3V |
<800mW@3.3V |
|
尺寸 |
Φ42*31.2mm |
Φ42*31.2mm |
Φ42*31.2mm |
Φ42*31.2mm |
|
重量 |
13.2g |
13.2g |
13.2g |
13.2g |
|
接头 |
GH1.25mm 8pin |
GH1.25mm 8pin |
GH1.25mm 8pin |
GH1.25mm 8pin |
|
工作温度 |
-40℃-85℃ |
-40℃-85℃ |
-40℃-85℃ |
-40℃-85℃ |
|
存储温度 |
-40℃-85℃ |
-40℃-85℃ |
-40℃-95℃ |
-40℃-95℃ |
|
罗盘 |
无 |
内置电子罗盘IST8310 |
内置电子罗盘IST8310 |
内置电子罗盘RM3100 |




丨结构特征
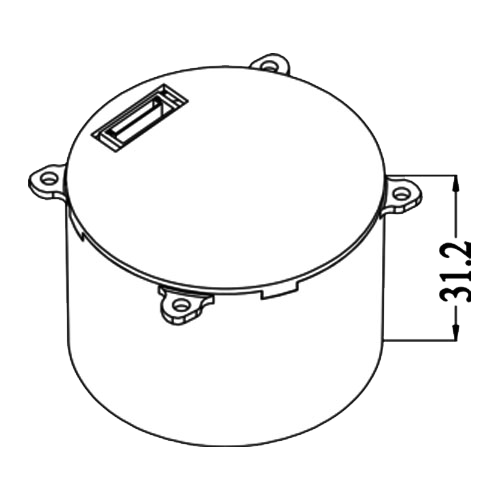
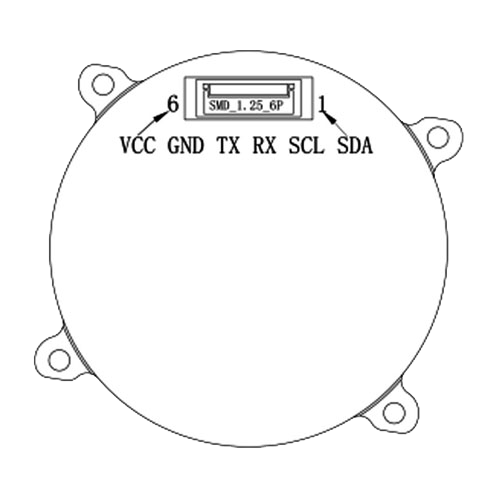
表 1: 6PIN 引脚定义
|
序号 |
名称 |
信 号描 述 |
|
1 |
VCC |
主电源输入,+3.3V~5V |
|
2 |
GND |
模块接地,这是电源的负端或公共接地点,用于完成电源电路。 |
|
3 |
TX |
发送(Transmit)这个引脚用于串行通信中发送数据到另一个设备。 |
|
4 |
RX |
接收(Receive)这个引脚在串行通信中用来接收来自另一个设备的数据。 |
|
5 |
SCL |
时钟线(Serial Clock)在I²C通信协议中,这是用来同步数据传输的时钟信号线。 |
|
6 |
SDA |
数据线(Serial Data)在I²C通信协议中,这是用于数据传输的线。 |
|
注:通常,VCC和GND用于提供电源,TX和RX用于串行通信,而SCL和SDA用于I²C通信。这些接口允许接收机与外部设备进行电力供应和数据交换。 |
||

表 2: 8PIN 引脚定义
|
序号 |
名称 |
信 号描 述 |
|
1 |
VCC |
主电源输入,+3.3V~5V |
|
2 |
GND |
模块接地 |
|
3 |
TX1 |
主串口(com1)数据接收,配置命令输入端口。 |
|
4 |
RX1 |
主串口(com1)数据发送,配置为“移动站”时输出 NMEA0183 格式定位结果, 配置为“基准站时”输出 RTCM2.x/3.x 格式差分数据流。 |
|
5 |
TX2 |
主串口(com1)数据接收,配置命令输入端口。 |
|
6 |
RX2 |
主串口(com1)数据发送,配置为“移动站”时输出 NMEA0183 格式定位结果, 配置为“基准站时”输出 RTCM2.x/3.x 格式差分数据流。 |
|
7 |
PPS |
时间标准脉冲输出 |
|
8 |
EVENT |
模块外部终端输出(默认关闭) |

Table 3: 8PIN 引脚定义
|
序号 |
引脚定义 |
描 述 |
|
1 |
VCC |
主电源输入,+3.3V~5V |
|
2 |
GND |
模块接地 |
|
3 |
TX1 |
UART1输出,3.3VTTL |
|
4 |
RX1 |
UART1输入,3.3VTTL |
|
5 |
SCL |
I²C Serial Clock (IST8310) |
|
6 |
SDA |
I²C Serial Data (IST8310) |
|
7 |
TX2 |
UART1输出,3.3VTTL |
|
8 |
RX2 |
UART1输入,3.3VTTL |

