丨 产品简介
K713-UM980型模组采用全系统全频RTK引擎,提供实时厘米级差分定位精度,适用于无人机、汽车及测绘领域。
模组支持“移动站”与“基准站”模式,利用载波相位差分技术精确消除多种误差,实现高精度定位。
特点:
1.技术先进,基于UM980系列,模组即使在恶劣环境下也可以获得稳定。
2.多系统频点支持,能够接收和处理多个卫星导航系统的信号。
3.50Hz数据输出率,能够快速响应并适应动态变化的环境。
4.能有效抵抗来自电子设备的干扰,保证定位信号的清晰和准确强化的电磁兼容设计。
5.完全兼容PIXHAWK和APM等其他自动飞行控制系统,支持多种飞行平台无缝集成。
6.采用工业级别低噪声射频电路,抗多径抑制强,提高信号接收能力。
7.内置四壁螺旋天线组合,增强信号接收能力,实现高精度定位。
丨 规格参数
|
芯片特性 |
芯片 |
UM980 |
|
工作频率 |
BDS: B1I B2I B3I B1C B2a B2b GPS: L1 C/A L1C L2P (Y) L2C L5 GLONASS: L1 L2 Galileo: E1 E5a E5b E6 QZSS: L1 L2 L5 L6 |
|
|
接收通道 |
1408通道 NebulasIVTM |
|
|
灵敏度 |
跟踪 |
-167 dBm |
|
重捕 |
-160 dBm |
|
|
冷启动 |
-148 dBm |
|
|
热启动 |
-157 dBm |
|
|
首次定位时间 TTFF |
冷启动 |
26s |
|
热启动 |
2s |
|
|
重捕获 |
2s |
|
|
精度 |
水平精度 |
普通定位:1.5m CEP |
|
RTK定位:0.8cm+ 1 ppm CEP |
||
|
高度精度 |
0.05m/s |
|
|
秒脉冲精度 |
30ns |
|
|
输出数据 |
波特率 |
115200bps(默认) [可选:4800-921600] |
|
输出接口 |
TTL |
|
|
输出协议 |
NMEA0183、RTCM 3.3 |
|
|
更新频率 |
默认1Hz ( 0.25Hz-50Hz) |
|
|
载波相位输出 |
支持,输出RAWX语句 |
|
|
FLASH |
内置 |
|
|
工作条件 |
高度 |
<5000m |
|
速度 |
<500m/s |
|
|
重力加速度 |
<4g |
|
|
环境 |
工作温度 |
-40℃-85℃ |
|
存储温度 |
-40℃-105℃ |
|
|
电气指标 |
工作电压 |
3V-5.5V DC |
|
功耗 |
<800mW @3.3V |
|
|
物理参数 |
尺寸 |
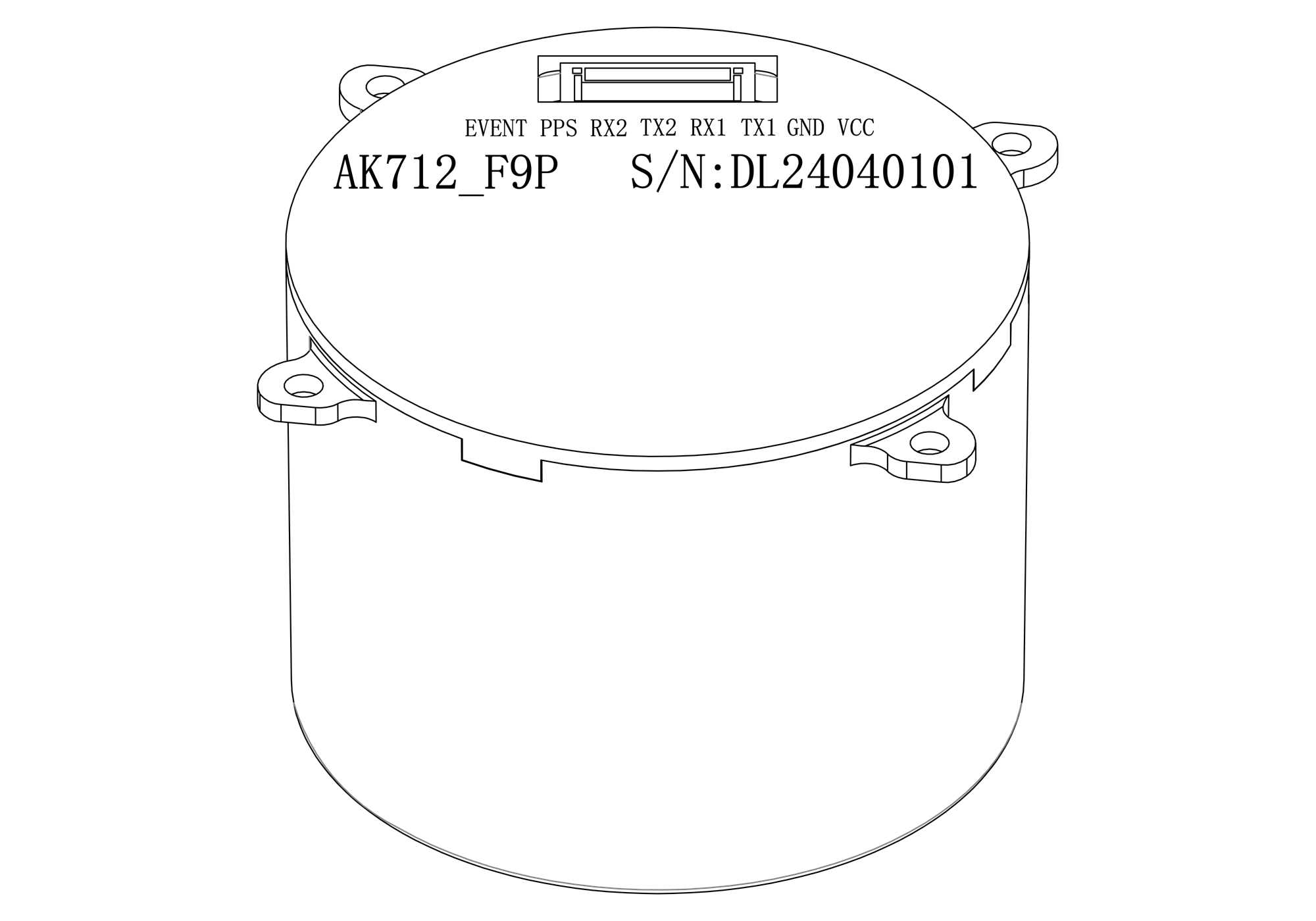
Φ40.2*25mm |
|
重量 |
13.2g |
|
|
接头 |
GH1.25mm 8pin |
丨结构特性